At the Automotive Innovation Lab (AIL) at the Faculty of Informatics and Information Technologies, Slovak University of Technology in Bratislava (FIIT STU), we recently explored a critical challenge for road safety and automated driving: how well do vehicles “see” lane markings under different road and weather conditions?
Modern Advanced Driver Assistance Systems (ADAS) and autonomous vehicles rely heavily on precise lane detection to keep cars safely in their lanes, estimate braking distances, and avoid accidents. While many studies use expensive stereo cameras or LiDAR, our team set out to test a simpler, more affordable approach using just a single camera.
The Study
Over the course of 96 drives across Slovak roads, we collected data on highways, suburban roads, and city streets, under four weather conditions: normal daylight, direct sunlight, twilight, and rain (with snow appearing in some cases). We then applied a single-frame lane visibility estimation model to analyze how far ahead a vehicle can reliably see lane markings.
To ensure accuracy, we designed a strict data-cleaning process. Frames with unclear or non-linear lane boundaries were filtered out, and we set upper and lower limits on measurable visibility (0–150 meters). After filtering, about 62% of all frames were suitable for analysis—with much higher success rates on highways compared to city roads.
Key Findings
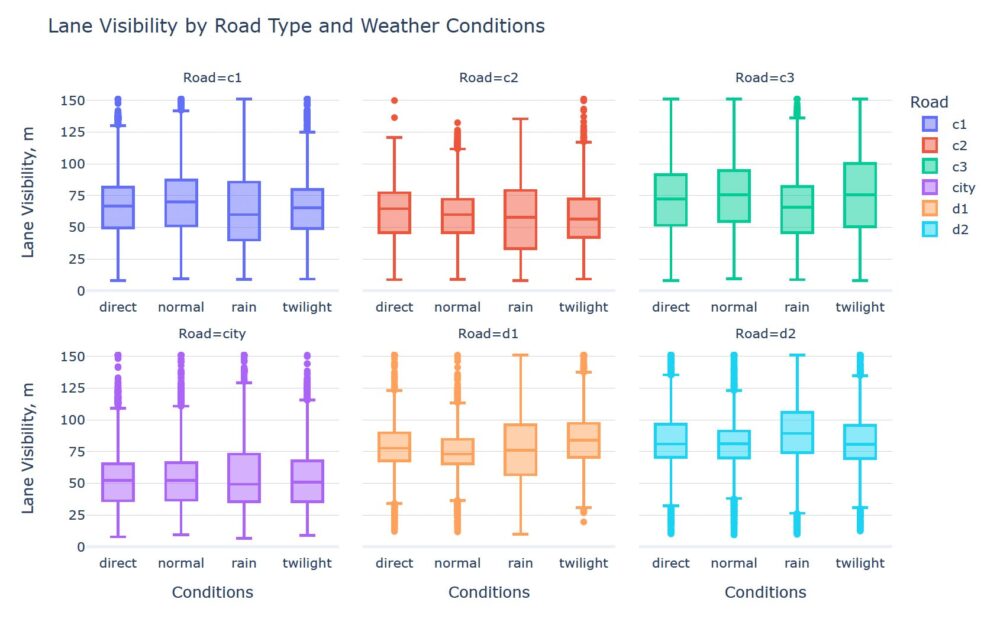
- Highways perform best. Median lane visibility was 82.2 m on the D2 highway and 78.7 m on the D1, with more than three-quarters of frames analyzable.
- Urban roads are most challenging. In city conditions, visibility dropped to just 51.6 m, with fewer than half of frames usable due to intersections, parked cars, and worn markings.
- Weather has a big impact.
- Rain reduced usable frames to just 42.6%, making it the most problematic condition.
- Snow, interestingly, sometimes improved highway visibility by 20–45 meters, thanks to clearer roadside outlines.
- Twilight caused smaller drops in visibility but stressed the camera’s dynamic range.
- Road geometry matters. Mountainous suburban roads (like Slovakia’s class c2) had frequent missing detections due to serpentine curves and uneven terrain.
Why It Matters
These findings confirm that road type and weather significantly influence the reliability of lane detection systems. While highways are generally well-suited for ADAS and automated driving, cities and poorly maintained suburban roads remain challenging. The results also highlight the importance of road maintenance, particularly repainting lane markings and clearing snow in winter, to ensure safety technologies can perform at their best.
Next Steps
Our research shows that a single-camera setup is feasible and cost-effective for real-time lane visibility estimation, but also that adaptive models and sensor fusion (combining cameras with radar or LiDAR) will be necessary for robust performance in all conditions. Future work will expand testing to other environments, such as fog or unpaved rural roads, and compare results across different climates.
Full research article is fully available (Open Access) here: https://doi.org/10.1109/ACCESS.2025.3611230