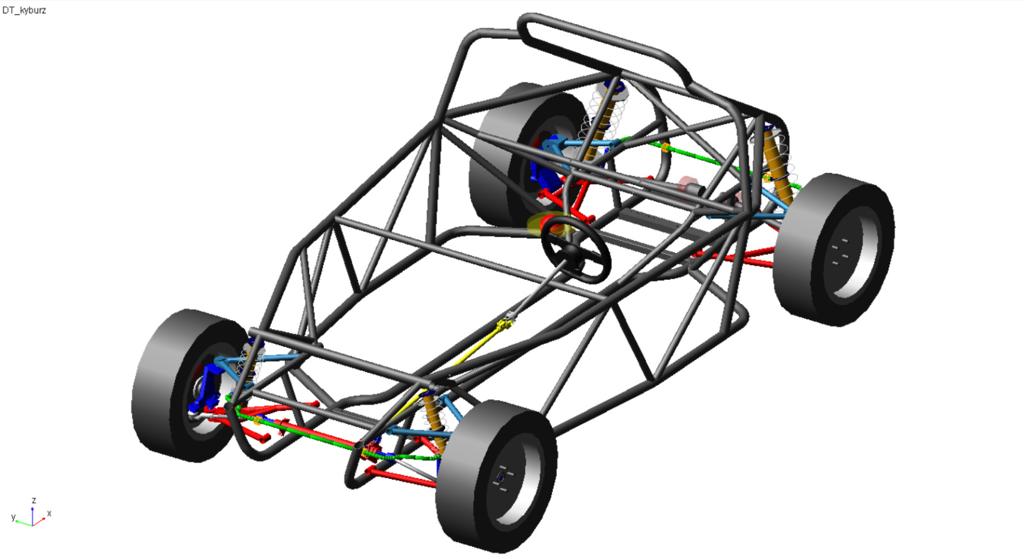
Within the framework of AIL, researchers at the Faculty of Mechanical Engineering are dedicated to the creation of a digital twin of a vehicle and at the same time to the creation of a virtual environment for testing the driving dynamics of such a twin. These two areas are closely related and their connecting element is the autonomous driving of such a vehicle.
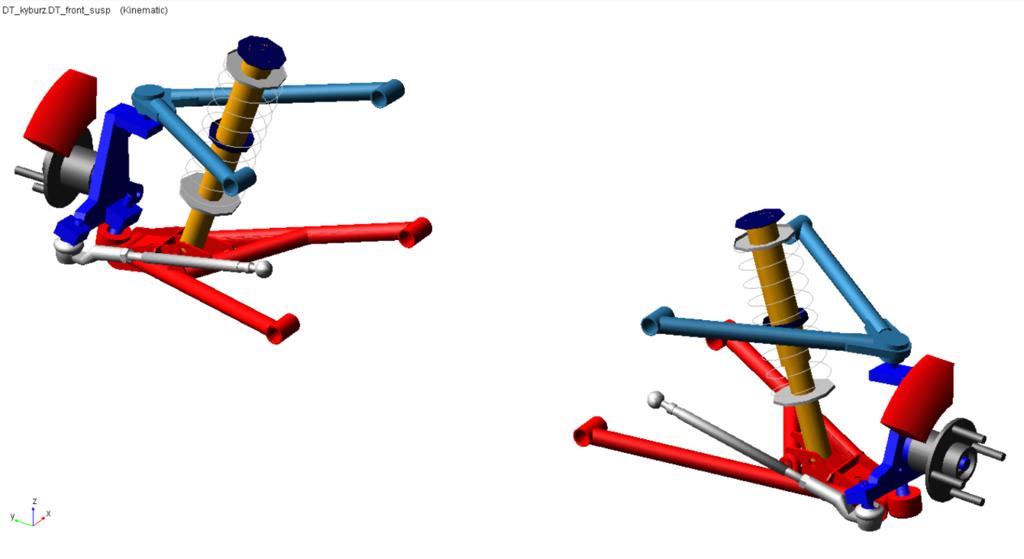
The acquisition of data for the creation of a vehicle model takes place from real driving maneuvers on a real road, where the key is to know the vehicle’s response to a defined driving maneuver. This further enables the calibration of the virtual model of the vehicle of the “future digital twin” for the response of bumps. The input values can be defined as the level of steering wheel rotation and the position of the pedals, the response is then vehicle yaw, roll and pitch as well as acceleration in all three axes (longitudinal, transverse and vertical).
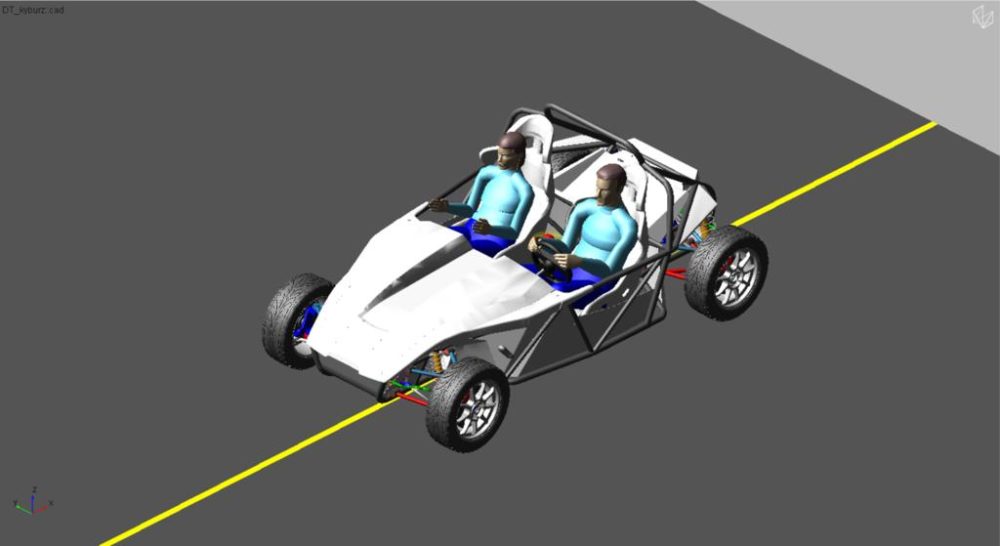
After the calibration of the virtual vehicle model, a large number of driving maneuvers can be applied to this virtual vehicle in the virtual environment, which enables the acceleration of development and the description of the dependencies between the control member, the vehicle and the environment.
In the meantime, AIL is working on creating an environment in which a virtual model of the vehicle is installed (of which there are several) and a fusion of sensors is created in this environment so that the placement and parameters of the sensors match reality and the outputs of these sensors match reality. There is already a virtual environment of the test circuit as well as a virtual copy of the city circuit, where driving situations of normal traffic can be modelled.
The goal, however, is to test autonomous vehicle control algorithms in non-standard driving situations such as situations on the verge of skidding, respectively in changing environmental parameters such as a change in road grip, a flat tire, sharp braking and steering the vehicle into an open space, etc.